
ASIMO
ASIMO = Advanced Step in Inovative Movility本田技研工業が開発し、ホンダエンジニアリング株式会社が製造している、
世界初の二足歩行ロボット。
▼3つのセンサ
・視覚センサ(高ダイナミックカメラ)
目のところに付いているカメラで撮影した画像から、
輪郭の特徴をつかんで、人を識別する。
・床面センサ(自己位置補正カメラ)
へそから下を見ている赤外線センサとCCDカメラ。
赤外線センサは、足元から2m先の床面と障害物を検出。
CCDカメラは床面上のマークを認識し、地図情報とのズレを補正する。
・超音波センサ(全周囲障害物センサ)
お腹から超音波を発して、3m先の人や障害物を検出。
視覚センサでは捉えられないガラスなどを見つける。

▼手首に力覚センサ
手首に搭載した力覚センサで、左右の腕の力を調整。
握手や手つなぎ歩行、ワゴン運搬、トレイの受け渡しなどができる。
▼6km/hで走るときには0.08秒、宙に浮いている。
歴史
▼Eモデル「Experimental Model」は、歩行の原理を研究する実験機で脚部のみ。
▼Pモデル
「Prototype Model」は、完全自律歩行を目指した試作機で、
上半身も開発され、より人型に近づいた。
▼ASIMO
身長 体重 歩く速度 走る速度 電源 稼働時間
(2000)120cm 52kg 1.6km/h Ni-H 30分
(2004)130cm 54kg 2.5km/h 3km/h Li-ion 40分-1時間
(2005)130cm 54kg 2.7km/h 6km/h Li-ion 40分-1時間
(2011)130cm 48kg 2.7km/h 9km/h ? 40分(自動充電機能)
応用
ヒューマノイドロボット研究で培った、「二足歩行技術」や「バランス制御技術」を応用している。
「UNI-CUB」「体重支持型歩行アシスト」
原発事故が起こった福島第一原発で作業する「高所調査用ロボット」
対話
→ASIMOにどんなことをしてもらいたいですか?実は、東日本大震災の後に、あることをしてほしいという意見が殺到したんです。
→なんだか分かりますか?
「ASIMOを原発に派遣できないか」って声です。
開発者は、ASIMOは無理だが、培った技術は何かの役に立つと考えました。
「バルブ開閉用作業アームロボット」を3ヶ月で開発。現場投入はできなかった。
続いて、原発内の細部をモニタリングする「高所調査用ロボット」を開発。
2013年6月18日、福島第一原発で稼動を始めました。
高所調査用ロボット
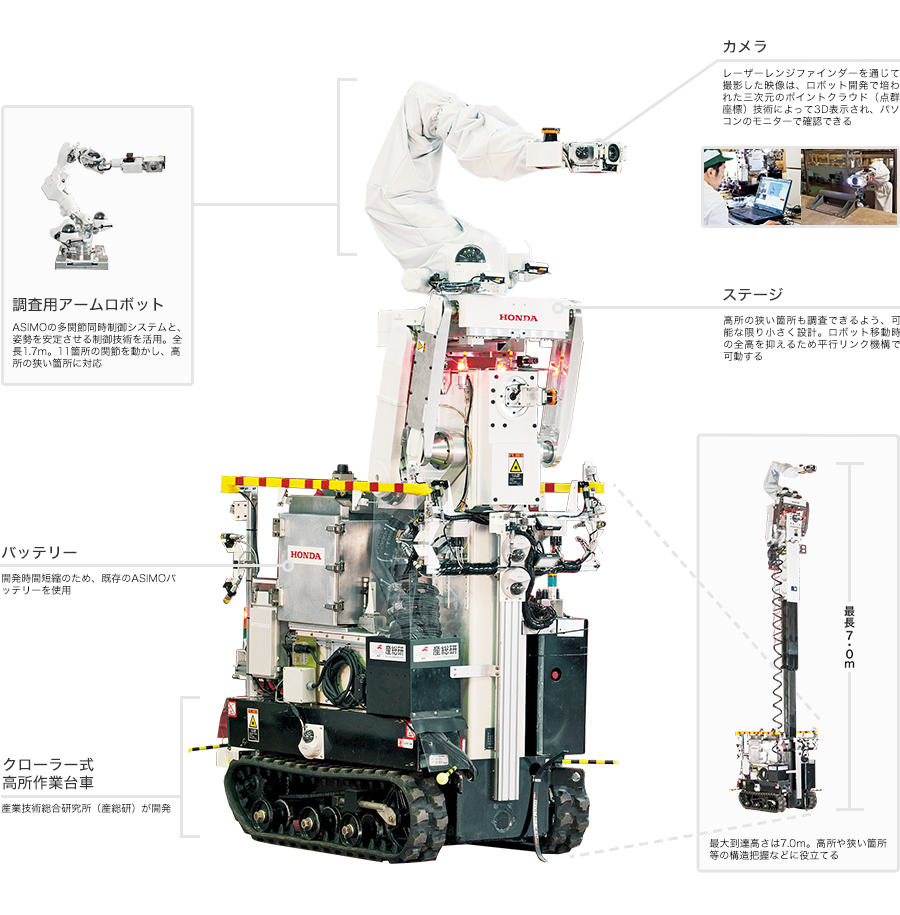
アームの先端に、線量計やカメラ、レーザーレンジファインダーを設置。
放射線量の測定や線源の特定、詳細な画像や三次元形状データの確認をしている。
最長7mまで伸びる。
ASIMOの開発で培った、技術を応用している。
・三次元のポイントクラウド(点群座標)により、構造物を立体的に表示する技術
・多関節を同時に制御するシステム
・アームが周囲の構造物に接触した際にその衝撃を吸収する制御技術

0 Comment:
コメントを投稿